ROBOTIC SYSTEM FOR PROSTATE BIPOSIES IN MRI ENVIRONMENT
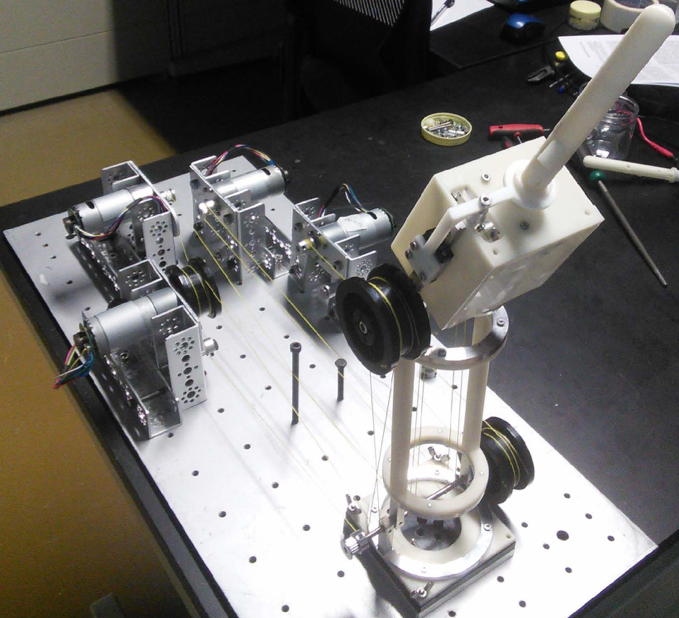
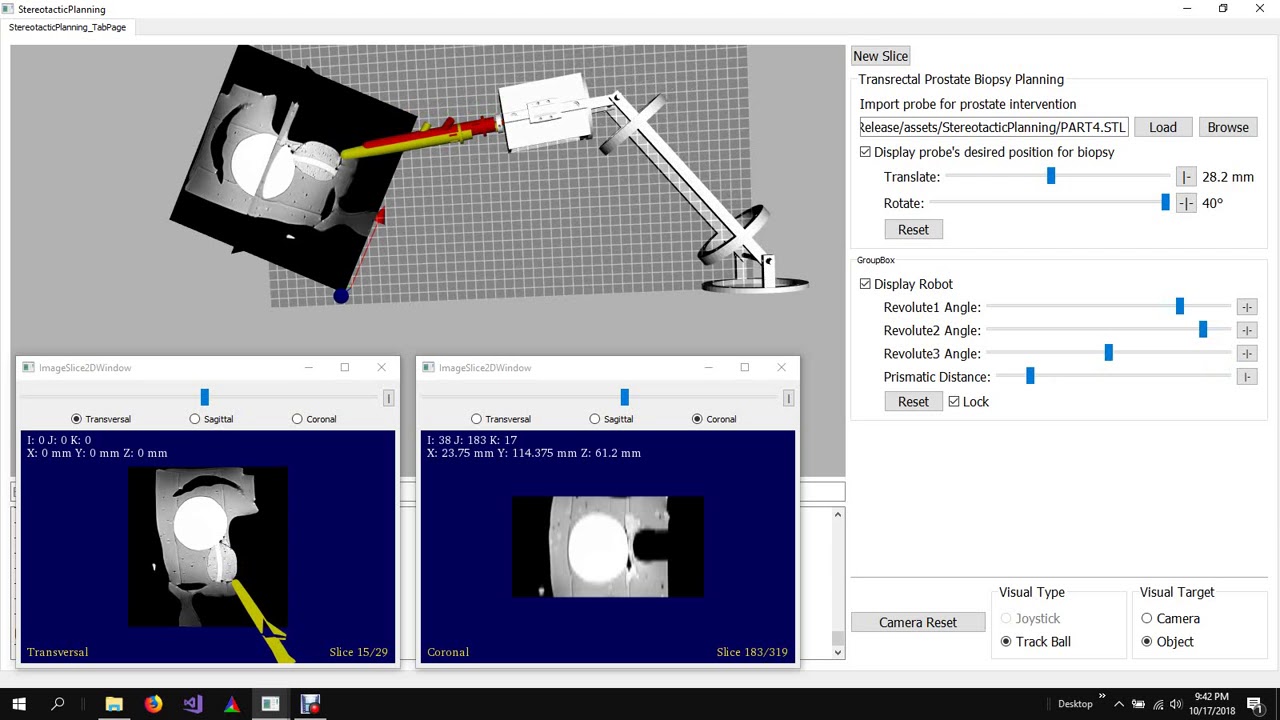
MR-guided prostate biopsy (MRgPBx) has emerged as a preferred technique among urologists in detection of prostate cancer. It provides better outcomes as compared to the conventional transrectal ultrasound-guided prostate biopsy. MRgPBx is performed either using an MR-compatible intervention system placed inside the MRI gantry or by using a MRI-ultrasound fusion system. In both transrectal systems, a probe with a needle compartment/guide is positioned inside the patient’s rectum to target the lesion under image guidance and then a biopsy needle is used to take tissue samples. To overcome these challenges, the work presents preliminary design of a generic actuated manipulator for targeted transrectal MRgPBx.
See video of the device here.