DRILL STRING STICK SLIP CONTROL
A control scheme with time-varying exponent was then developed to deal with stick-slip and bit-bounce of the rotary drilling system such that the tracking objective of the rotary table velocity is achieved. To track a trajectory dominated by a specific performance, a reference model with desired poles/zeros features was prescribed. The ISM with time-varying exponent included the following two parts: equivalent control and switching control. The equivalent control using the signals from the observer and reference models was constructed to obtain the desired control behavior. The ISM with time-varying exponent has three features: First, it can control the transient stage of the rotary drilling system and ensures the system to remain in the sliding condition for whatever unusual or existing external disturbance and guarantees asymptotic stability. Second, the ISMC has the advantages of sliding mode, integral sliding mode, and nonsingular terminal sliding mode control schemes. It also offers some superior properties, such as faster finite time convergence, than that with constant exponent. It is worth noting that the time-varying exponent does not necessarily need to be integer. The stability analysis of the closed-loop system is verified using Lyapunov stability theorem. The simulation results showed that the ISMC law is capable of accurately controlling the bit speed. It also leads to faster dynamic responses and suppresses torsion stick-slip induced vibrations, axial bit-bounce, and external disturbances affecting the rotary drilling system.
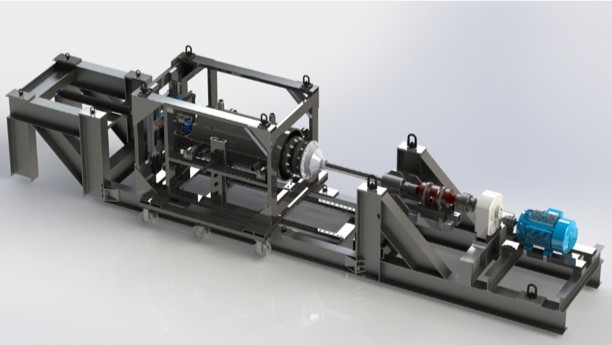
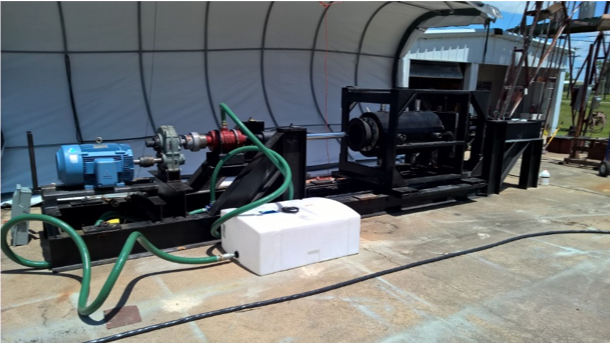
See video here of the experimental setup.


